澳门永利官网棋牌.无刷电机的工作原理与扭矩
发布时间:2024-02-21 00:31:27 来源:永利澳门官网入口 作者:永利皇宫棋牌2023最新版本产品介绍
大家对电机的认识可能就是高中课本里的交变电流章节的例子,电刷+外磁场+通电线圈。这是最经典的有刷电机。但是今天咱们谈论的是另一种更高效、性能更好的电机——无刷电机。
如图是无刷电机的等效模型。内外两个灰色的轮子一个是定子,一个是转子(具体哪个是定子哪个是转子根据电机类型有所不同)。此时转子和定子是完全重合在一起的,没有扭矩的存在。
所有的电机扭矩的大小正比于内外两个磁场的叉乘,即图中围出的平行四边形的面积。可见两个磁场重合时,叉乘为0,扭矩也为0,和之前的直观认知相符合。显然,当两个磁场呈90度时,平行四边形面积最大,此时的扭矩也最大。
实际的无刷直流电机(BLDC)或永磁同步电机(PMSM)通常用三相****交流绕组线圈充当定子,永磁体作为转子。我们希望通过电路控制定子绕组的输出,使之能够能产生一个大小尽可能恒定的旋转磁场,让转子和定子的扭矩达到最大值。
FOC(Field-Oriented Control),即磁场定向控制,也称矢量变频,是近几年较为主流的高效控制无刷直流电机(BLDC)和永磁同步电机(PMSM)的选择。
要得到一个恒定大小的旋转磁场很容易。当今主流的BLDC和PMSM电机定子均采用的是三相绕组,即各个绕组上的交流信号就是相位互差120°的信号。根据三相电机的结构,我们可以将一个恒定大小的旋转电压矢量分解到相位互差120°的方向上。如下图
从上图可以看到,只要控制电机的三个绕组产生相位互差120°的大小随着时间按正弦规律变化的3个分矢量,就可以得到我们想要的旋转磁场
然而,在实际的电机控制中,由于齿槽效应、磁通畸变等因素,电机的转矩会产生大量的波动,需要不断地对控制信号做出修正。但是当电机转速较高时,电流环必须跟踪频率不断提高的弦波信号,而且还要克服振幅和频率不断提高的电机反电动势。在这样的情况下,想要直接通过维持三路正弦信号得到旋转平滑、大小稳定并且一直保持和转子磁场方向垂直的磁场难以实现。
我们重新回到一开始的磁场叉乘。我们发现电机的转矩只与 平行于内磁场方向(称d轴)的磁场分量 和 垂直于内磁场方向的分量(称q轴)有关(如下图)。
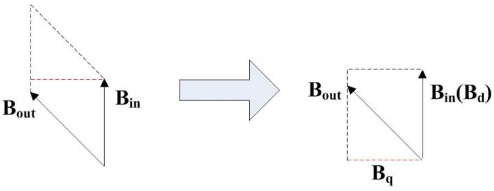
现在对于电机扭矩大小的控制就变成了q轴和d轴大小乘积的控制。在电机中,d轴上内磁场的大小是永磁铁产生的,是恒定的;我们对外磁场的控制实质上变成了q轴上的分量大小控制+外磁场的角度。
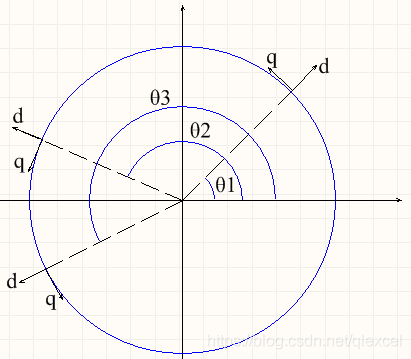
如上图所示,如果转子的电角度在θ1,则我们就要在θ1处产生d、q轴大小的外磁场。如果转子的电角度在θ2,则我们就要在θ2处产生d、q轴大小的外磁场。
我们把角度θ1的情况单独提出来,把它移到原点去,然后把x、y轴重命名为α,β。根据空间矢量的关系,我们可以把q、d轴的大小分解到α,β轴上。这个过程就是所谓的“反帕克(Park)变换”。
绕了这么多弯弯,我们终于让电机转起来了。大家看到这里可能会说:“这是在折腾啥?(╬ ̄皿 ̄)不还是最后转成三个相差120°的正弦信号了吗?”
我们先测量电机的3相电流。电机的信号如下图所示(把相差120°的电信号看成同一个旋转向量在三个相差120°坐标轴上的投影)
根据我们之前的理论,我们需要的是两个互差90°的磁场。这里咱们又使用一个变换,把三个分磁场变换成α、β方向上的两个分磁场。这个叫做“克拉克(Clarke)变换”。
再把α,β轴上的值映射到旋转的q、d轴上,得到此时电机实际的d值和p值。这是之前反Park变换的逆过程,“帕克Park变换”
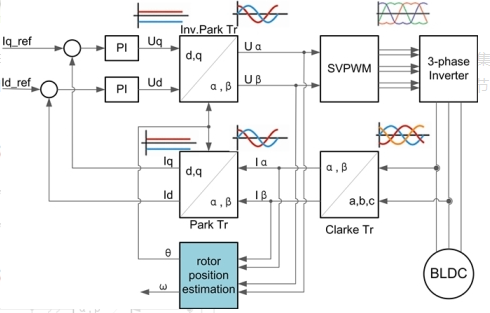
我们把测量到的d、q轴值与我们设定的值做对比,通过PI算法消除误差,再重新通过之前的流程输入到SVPWM中,这就完成了一个闭环控制,可以对定子磁场的做动态修正了。因为控制d、q是在控制电流值,所以这个环路叫做电流环。
测量q、d轴的值:测量电机的相电流(测量两相,通过Ia+Ib+Ic=0得到第三相),然后通过Clarke变换得到Iα和Iβ,然后通过park变换得到q、d轴的值。
把测量到的d、q轴值与我们设定的d0、q0做对比,进行PID处理。(目标是让测量值与我们的设定值相同)
调整d、q值输出,回到1.除了电流环之外,由于d、q是直流信号, 我们通过d、q也可以更轻松地控制电机的转速和旋转位置。比如设定电机转速为1000Rpmin,编码器测得当前转速为500,同样用PID算法增大q值就可以加大扭矩,让电机的速度加快了。这个环路叫速度环,即在电流环的外面加一层,改变q、d设定值来改变速度。当然我们也可以加上位置环,通过对速度的积分可以得到电机的位置,计算位置误差进行PID调整。看ヾ(✿゚▽゚)ノ,我们把对三相交流正弦信号的控制转换成了对直流信号d,p的控制,这样优势就出来了,很nice~
除了FOC之外,还有其他控制电机的方法,比如梯形波式控制、弦波控制等。详细介绍可以参考这篇文章
简单概括,弦波式换相能让电机在低速下运转平稳,但在高速运转下效率却大大降低;而梯形波式换相在电机高速运转下工作比较正常,但在电机低速运转下,会产生力矩的波动。因此,矢量控制是对无刷电机的最佳控制方式~
调了一天多的无刷电机,用的无刷电调,其实本来应该是用32做的,但是不知道原理, 于是用了比较熟悉的51单片剂一下来进行调试 一下,查询的资料,还是蛮简单的,但是实际操作并没有那么容易, 在网上查也没有能用的程序,尤其是51,因为基本用无刷的都是无人机 四六轴。所以今天贴上我的程序,分享给大家,希望能对各位减少时间学习,快速上手,本程序实现的功能是在第一次给无刷电机上电后,首先拉高油门,然后降低油门,最后满开油门,注意,,,,注意,,,,注意,一定不要用带螺旋桨的无刷电机来实验,危险,开机后会全速运行,我开全速是为了用涵道,所以全速,, 废线单片机源程序如下: /**********************
初步调试成果和学习经历 /
—表面贴装型小型封装有助于减小表贴面积和电机驱动电路板的尺寸— 中国上海,2023年8月24日——东芝电子元件及存储装置株式会社(“东芝”)今日宣布,推出两款600V小型智能功率器件(IPD)---“TPD4163F”和“TPD4164F”,可用于空调、空气净化器和泵等直流无刷电机驱动应用。“TPD4163F”和“TPD4164F”的输出电流(DC)额定值分别为1A和2A,于今日开始支持批量出货。 这两款新产品均采用表面贴装型HSSOP31封装,与东芝之前的产品相比,表贴面积减小了约63% ---这不仅缩小了电机驱动电路板的尺寸,同时也降低了电机高度。 考虑到在供电不稳定的地区,供电电压可能波动较大,因此该新产品
驱动的600V小型智能功率器件 /
传统的直流无刷电机采用方波控制方式,控制简单,容易实现,同时存在转矩脉动、换相噪声等问题,在一些对噪声有要求的应用领域存在局限性。针对这些应用,采用正弦波控制可以很好的解决这个问题。 直流无刷电机的正弦波控制简介 直流无刷电机的正弦波控制即通过对电机绕组施加一定的电压,使电机绕组中产生正弦电流,通过控制正弦电流的幅值及相位达到控制电机转矩的目的。与传统的方波控制相比,电机相电流为正弦,且连续变化,无换相电流突变,因此电机运行噪声低。 根据控制的复杂程度,直流无刷电机的正弦波控制可分为:简易正弦波控制与复杂正弦波控制。 (1)简易正弦波控制: 对电机绕组施加一定的电压,使电机相电压为正弦波,由于电机绕组为感性负载,因此电机相电流
的正弦波控制 /
随着电力电子技术,新的永磁材料以及具有快速运算能力的DSP(数字信号处理器)的发展,直流无刷电机应用日益普及。直流无刷电机具有和直流电机相似的优良调速性能,又克服了直流电机采用机械式换向装置所引起的换向火花、可靠性低等缺点,且具有体积小、重量轻、效率高、电机的形状和尺寸灵活等优点,因此广泛应用在伺服系统、数控机床、电动车辆和家用电器各领域,成为现代伺服技术的主方向。 本文的主要内容是基于DSP芯片MC56F8323的直流无刷电机的硬件设计。主要包括电流环、速度位置环和IPM(智能功率模块)驱动电路的硬件设计。 2 系统设计 2.1 系统硬件框架设计 MC56F8323是FREESCALE(飞思卡尔)半
的硬件设计 /
摘要: ML4425/4426是Micro Linear公司推出的一种智能型无刷电机专用电路。该电路能提供起动和控制Δ和Y绕组、无刷电机的速度、换向所需的所有功能。文中介绍了ML4425/4426的特点、引脚功能、运行原理以及典型应用电路,并给出了一个完整的高电压电机的驱动电路。 关键词: 无刷电机 换向 速度控制 ML4425/4426 1 功能特点 ML4425/4426是Micro Linear公司推出的智能型无刷电机专用,可用于为三相无刷电机提供封闭回路的换向控制信号,同时利用PWM模式还可对电机速度进行控制并对电机进行必要的保护。ML4425/4426的特点
贝加莱ACOPOS P3除具有市面上厂家伺服的基本功能外,尺寸更小、速度更快、精度更高。现在ACOPOS P3还具有安全限制扭矩(SLT)安全功能,安全限制扭矩可以安全地扭矩,达到SIL 2 / PL d的安全等级,贝加莱成为首批提供该认证安全功能的制造商之一。 贝加莱ACOPOS P3伺服驱动器现在还具有安全限制扭矩(SLT)安全功能。 借助于直接集成在驱动系统中的,扭矩被限制在可配置的最大值。由于安全功能在驱动器中分布式运行,因此可确保将最大故障检测时间缩短至8 ms。特别是当它与安全功能结合使用时(例如安全限速或安全方向),SLT功能有助于实现操作人员与其机器之间的安全协作,从而最大限度地降低了操
日前,德州仪器 (TI) 宣布推出一款可启动无刷直流 (BLDC) 与永磁同步 (PMSM) 电机的完整电机控制评估套件。该 DRV8312-C2-KIT 是一款高性能、低功耗、低成本的无传感器磁场定向控制 (FOC) 及梯形通信平台,其可帮助电机实现创新,加速不足 50 V 与 6.5 A 无刷电机的开发,从而可推动医用泵、门、升降机与小型。
上一篇:大位移振动试验系统
下一篇:直驱电机选型与应用指南(三)
 扫描二维码
扫描二维码